Mechanical Enineering Dept
Space Elevator Project
HOME
研究室について
研究室構成員
江上正
研究テーマ
2020年度研究テーマ
過去の研究テーマ
アクセス
Mechanical Enineering Dept
Space Elevator Project
HOME
研究テーマ
研究テーマ
2022年度研究テーマ
過去の研究テーマ
HOME
研究室について
研究室構成員
江上正
研究テーマ
2022年度研究テーマ
過去の研究テーマ
アクセス
2022年度研究テーマ
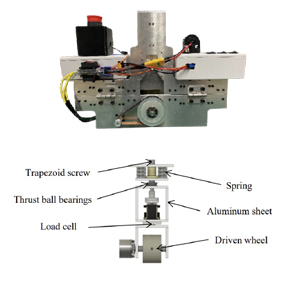
自動押付力調整機構を搭載したベルトクライマーの開発
詳細はこちら
自動押付力調整機構を搭載したロープクライマーの開発
詳細はこちら
スパイラル推進機構を用いた姿勢制御クライマーの開発
詳細はこちら
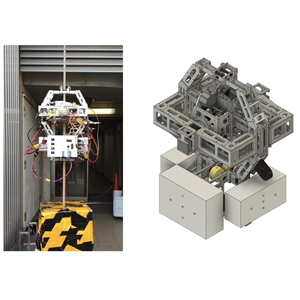
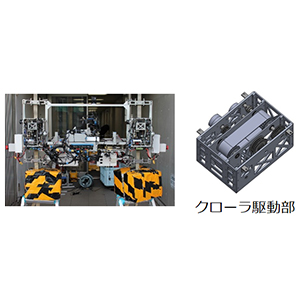
インフラ検査用H型クローラクライマーの開発
詳細はこちら
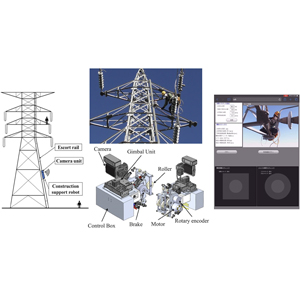
架空送電鉄塔を昇降する工事支援ロボットの開発
詳細はこちら
物体認識技術を用いた監視ロボットシステムの開発
詳細はこちら
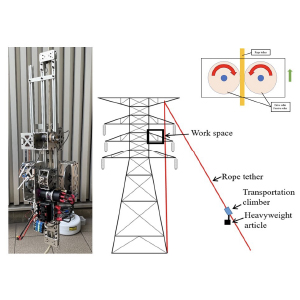
架空送電鉄塔を昇降する重量物搬送ロボットの開発
詳細はこちら
アイリスロボットハンドの開発
詳細はこちら
側面開閉機構を有するアイリスロボットハンドの開発
詳細はこちら
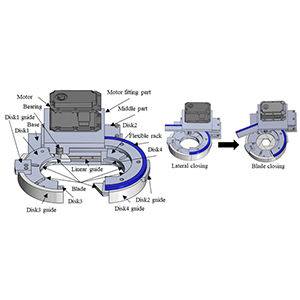
円錐型アイリスロボットハンドの開発
詳細はこちら
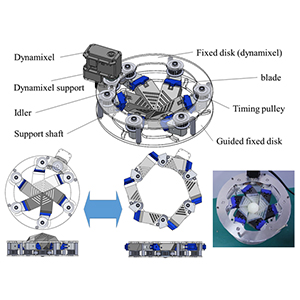
アイリス多指ロボットハンドの開発
詳細はこちら
アイリスハンドを搭載したドローンの開発
詳細はこちら
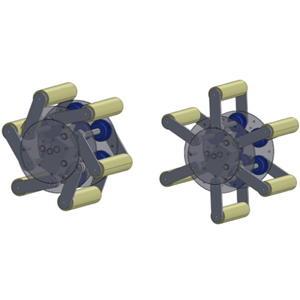
アイリス機構を応用したホイール径可変車輪の開発
詳細はこちら
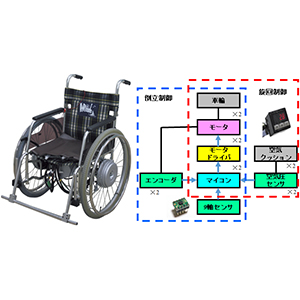
体動による旋回機能を持つ倒立振子型電動車いすの開発
詳細はこちら
電動車いすの体動による進行方向指示装置の開発
詳細はこちら
ボール&プレート経路制御装置の開発
詳細はこちら
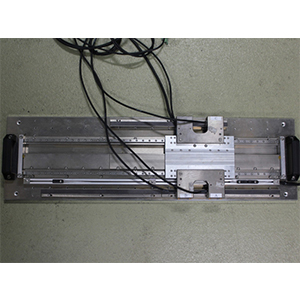
連結式リニアモータ制御
詳細はこちら
過去の研究テーマ
リアクションホイール機構を用いた宇宙エレベータークライマーの姿勢制御
詳細はこちら
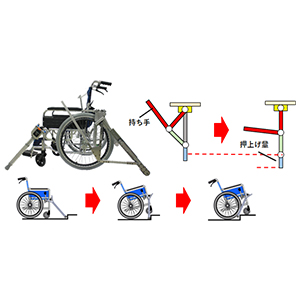
車いすの段差乗り越え補助機構の開発
詳細はこちら
屋内昇降試験機の開発
詳細はこちら
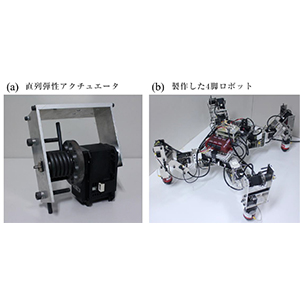
弾性アクチュエータを用いた4脚ロボットの足探り歩行
詳細はこちら
形態可変型ロボットハンドシステムの開発
詳細はこちら
セミアクティブショックアブソーバのインテリジェント制御
詳細はこちら