リアクションホイール機構を用いた宇宙エレベータークライマーの姿勢制御
本研究室では宇宙エレベータークライマーの機構について研究を行ってきている。宇宙と地上を結ぶテザーとしては、地上付近では風などの環境の影響を受けにくいロープテザーが有利とされている。しかし、ロープテザーは風などの影響によりテザー周りに回転してしまう問題点がある。
本研究室では、これに対処して姿勢制御を行うために、CMG(Control Moment Gyro)ユニットの開発なども行ってきているが、本研究では制御が比較的容易かつ小型、軽量で連続的に長時間の姿勢制御を可能とするリアクションホイール機構を用いた姿勢制御ユニットの開発を行っている。リアクションホイール機構とはホイールにトルクを加えることで発生する反トルクによってクライマーの姿勢制御を行う機構である。リアクションホイール機構で有効に姿勢制御が行えることは確認してきているが、リアクションホイール機構は、同じ方向に外乱を受け続けたときに飽和してしまい制御不能になるため、姿勢制御と飽和復帰の2つの動作を実現できる機構を検討している。
車いすの段差乗り越え補助機構の開発
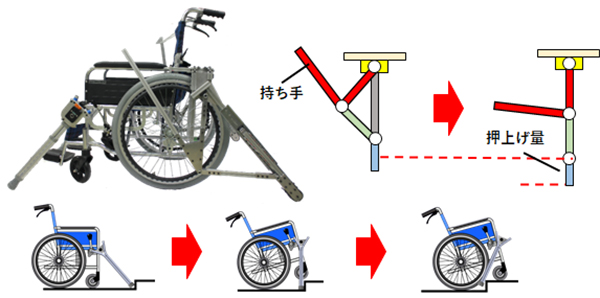
車いすでの移動には制限があり、段差に差し掛かった場合、車いす使用者が自力で乗り越えを行うのは難しく、介助者の補助を必要とすることが多い。
本研究室では、介助者の補助が無くても段差を乗り越えることができる補助機構の開発を目的とし、手動車いすに対して段差乗り越え補助機構の開発を行っている。補助機構の開発を行うにあたってモータ、マイコンなどを一切使わず、メカニズムだけで問題を解決するというコンセプトのもと、車いす使用者の運動能力を活かした松葉杖型補助機構と、倍力型補助機構を併せた段差乗り越え補助機構の提案を行っている。
松葉杖型補助機構を用いた段差乗り越えの動作としては、段差に差し掛かった際にこの補助機構を段差に押し当てて支え棒とすることで前輪を持ち上げて乗り越える。松葉杖型補助機構はシンプルな機構で容易に前輪を持ち上げることができるが、後輪の持ち上げの補助はされないため、100mmより高い段差となると後輪の乗り上げが難しいことが実験で確かめられている。そこで後輪の段差乗り越え補助用に開発したのが倍力型補助機構である。倍力型補助機構とはいわゆる「てこの原理」を利用したもので、力点でのモーメントと作用点のモーメントが等しいことを利用し、作用点と支点の間を短くすることによって力点に加えた力よりも大きな力を作用点に与え、その力を後輪の持ち上げの補助に利用したものである。
屋内昇降試験機の開発

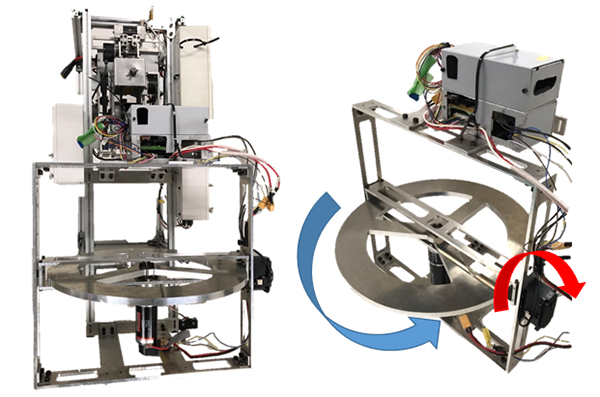
宇宙エレベータは、ロケットに代わる輸送手段として構想されているものである。地球の自転速度とほぼ同速の公転軌道である静止軌道上の宇宙エレベータからテザーを地表付近まで伸ばし、テザー上を走行するクライマーによって宇宙との間を結ぶ。現在、江上研究室ではクライマーの基礎的な研究開発を行っている。
現在、江上研究室では校舎壁面を使った試走路を有している。しかし、距離は25mと短く、天候によって実験の実施が左右される。そこで試験環境の整備の一環として2009年度より、屋内試験機の開発を行っている。
屋内試験装置は、環状のベルトテザーをモータで駆動する。クライマーの位置をレーザーセンサで読み取り、クライマーの速度に合わせてベルトの回転速度を制御している。またベルトの張力についてもテンションセンサーにより自動調整可能である。
通常使用する写真のような据え置き型以外にも、展示や特殊環境での試験が行える移動組み立てが可能なタイプも製作している。
弾性アクチュエータを用いた4脚ロボットの足探り歩行
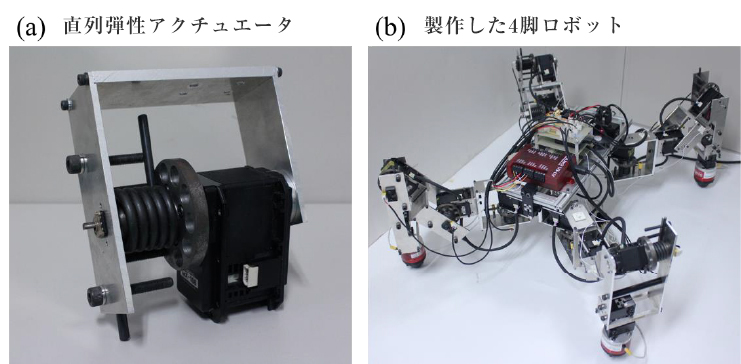
被災地などの復旧作業では2次災害などの危険かつ重労働を要するためロボット化が図られ、走破性の高い脚ロボットが注目されている。さらに、がれき、落下物、救助の人的接触のため、機構的に柔らかい脚ロボットが必要と考えられる。
本研究では、脆弱環境下において足先の力分散を行い安定した歩行を行う直列男性アクチュエータを用いた4脚ロボットの開発を目的として研究を行っている。そのため各関節にばねを使用した機構的に柔らかいロボットを開発する。このロボットはばねを使用し、ばねのたわみを計測することにより足先の抗力を推定することができる。これにより力覚センサを用いず足先力の制御が可能となり、力分散を行い安定した歩行を行うことができる。
トーションばねを12関節すべてに用いて、脆弱環境下を想定した足探り歩行の実験を行うため、推定結果と足先に搭載した6軸力覚センサの値の比較を行い、足先の抗力の推定が可能であることの検証を行っている。
形態可変型ロボットハンドシステムの開発
ロボットハンドで様々な作業を行うには多指多関節ロボットハンドが適している。一般に単純な作業の場合には2本指のグリッパ型が、複雑な作業や汎用性を重視する場合になると3本指3関節ハンドが用いられることが多い。さらに最近ではヒューマノイド型ロボットなどには人間型ハンドである4本、5本指ハンドが用いられている。ヒューマノイド型ハンドは人間の手に似せて作られたものであり、人間が行う作業をそのまま行うことが要求されている。しかし、実際にはアクチュエータの自由度や機構上の制約により実際の人間の手の作業には遙かに及ばないものになる。
これらのロボットハンドの共通した形態上の特徴をみると指の本数はそれぞれ2本~5本で固定されており、その指の付け根と掌の結合部は固定されていることが一般的である。このためこれらのハンドの中で一番汎用性が高いと考えられるヒューマノイド型ハンドにしても作業内容はその形態による制約を受ける。
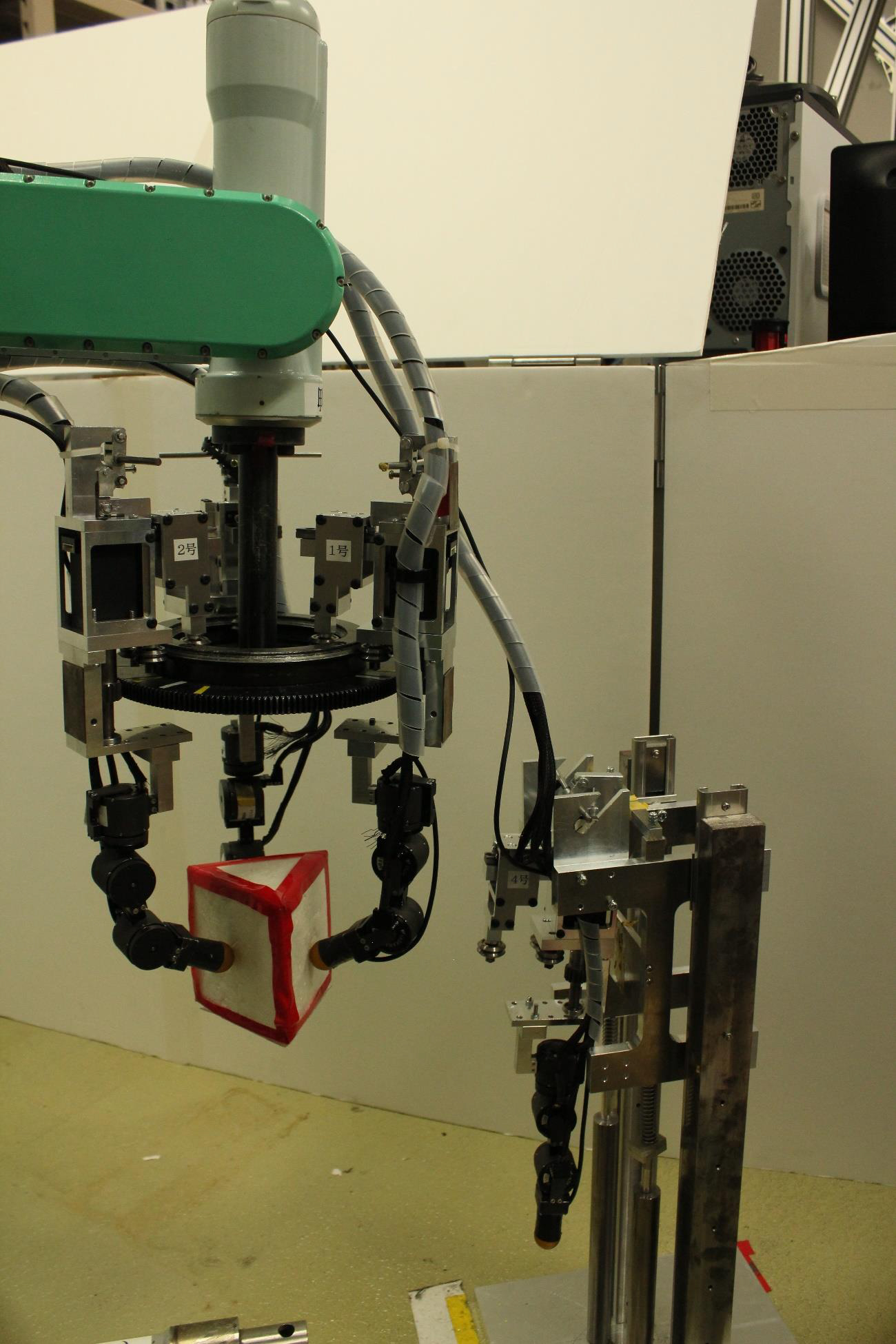
このため指の本数とその付け根の制約を緩和したロボットハンドはどのようになるかという発想で、形態可変型ロボットハンドシステムを提案している。このシステムは形態可変型ロボットハンドとそれを装着するロボットアーム、指の自動着脱に用いるスタンドから構成される。その主要要素である形態可変型ロボットハンドは各部をモジュール化することにより、「指の本数が可変」、「指の付け根の配置が可変」、「指以外のモジュールを装着可能」という特徴を備えたものである。
この形態可変型ロボットハンドは、自動的に指を着脱することで、指の本数を2本から6本まで変えることができる。ロボットハンドに設置されているCCDカメラで、対象物の形状や数などを画像処理により認識し、これらと作業内容を考慮して適切な指の本数と配置を決定する。指の本数が装着されている指の本数と異なれば自動的に適切な数に着脱した上で、指の付け根が適切な配置となるように指を移動する。通常の指では困難な特殊な作業の場合には、爪付の指など特殊な用途を持った指モジュールを装着して作業を行うことも可能である。これらの特徴によって把握対象物や作業内容に合わせた形態をとることができ、従来のロボットハンドに比べ汎用性の高い複雑な作業が容易となることが期待できる。
このロボットハンドは、様々な作業を行う場合や作業を限定した場合などのような形状のロボットハンドが適しているかというロボットハンドの研究を行うためのプラットホームともなり得る。例えば指がヒューマノイド型ハンドより多い6本あったら作業にどのような拡張性が見いだせるのかといったことを検討する材料にもなると考えられる。
セミアクティブショックアブソーバのインテリジェント制御

運動している物体がほかの物体に衝突すると急激なエネルギ変化により衝撃が生じる。この運動衝撃や衝撃音を緩和するための装置がショックアブソーバ(緩衝装置)である。その性能として求められるのは、ストローク全体にわたってできるだけ小さく一定の抵抗力を発揮しながら必要なエネルギ変換を果たすことである。
しかし、従来のショックアブソーバはあらかじめ衝突物の質量や衝突エネルギなど、細かい使用条件をもとに設計された受動的なものが一般的である。このためこれらの条件が変化した場合には対応できない。特に衝突物の質量が一定であれば、多少衝突エネルギが異なっても比較的安定した高い緩衝効率を得ることができるが,同じエネルギで衝突物の質量の異なる場合に高い緩衝効率を得るのは難しい。
本研究では、単孔式のオイル式ショックアブソーバにオリフィス面積を調整する調整軸を取り付け、調整軸をステッピングモータにより回転させる機構のセミアクティブショックアブソーバの試作を行っている。これは、ステッピングモータによりショックアブソーバ内のオリフィス面積を能動的に変化させ、オリフィスを通過するオイル流量を調整しながら緩衝特性を能動的に制御するものである。
小型で低コスト化を目指し、センサとしてロードセルのみを用い、ロードセルから得られる抗力値のみから衝突物の質量とエネルギの推定を行うインテリジェントシステムを提案している。そして抗力値の落下試験データのみから、ニューラルネットワークを用いて、自動的に衝突物の質量とエネルギの推定則を構築するシステムを開発している。次にこのシステムから得られる衝突条件の推定値を用い、条件に合ったオリフィス面積の制御を行うための制御則を構築している。
試作したショックアブソーバは使用するオイルが圧縮や温度特性変化を伴う非線形性をもつことから数学モデルの構築が困難であるため、制御方法としてファジィ推論法を用いる。その際、メンバシップ関数の形状の調整は実験や経験に依存して試行錯誤的に行うと実用面で問題となるため、ニューラルネットワークでの学習機能を用いたニューロ的ファジィを用いて自動的に行っている。