|
水圧駆動システムでは,水圧アクチュエータの動作を制御するために,水の圧力・流量・方向を制御するための各種制御弁が必要となります.これは,電動モータによる駆動システムにおいて,モータの動作を制御するためにモータに供給する電圧・電流・方向(正負)を制御することに相当します.
電動モータを駆動するためのモータドライバは,通常そのモータとセットで購入するか,互換性のある標準品を入手することができます.しかし,圧力水準として 14 MPa程度まで使用可能な水圧用の制御弁は,現在市場に供給されているもののほとんどが単純な開閉動作をするもので,高精度な制御を行うための機器が十分に揃っていないのが現状です.
油圧用の制御弁の部品を,水圧用として錆びない材料に変更すれば済むわけではありません.動力伝達媒体としての水道水は,工業上の特性が極めて悪いため,以下のような様々な問題を引き起こします.
- ◇ 高い飽和蒸気圧による問題
- 弁絞りにおけるキャビテーションの発生,キャビテーション壊食による機器寿命の低下,振動・騒音の発生,キャビテーション閉塞による弁の圧力流量特性の変化
- ◇ 低い粘性による問題
- しゅう動部すき間を通る内部漏れ流量の増加(エネルギー損失の増加),しゅう動部すき間を小さくするための高精度な部品加工によるコスト増,狭いすき間寸法(数μm)以上の水中微粒子を除去するための汚染管理(コンタミネーションコントロール),振動減衰効果の不足による動特性の悪化
- ◇ 低い潤滑性による問題
- しゅう動部の摩擦,摩耗の促進
- ◇ 化学的特性による問題
- 錆・腐食の発生,微生物の発生,運転可能温度の制限,水質(水の硬度)の管理
上記の問題を解決するためには,油圧用の弁構造を参考にしながらも,水圧用として最適な構造・材質・表面処理などにする必要があります.また,水圧システム導入のための初期コストを抑制するためには,コスト低減も重要です.
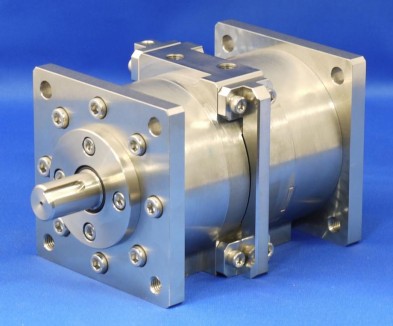
制御弁を大別すると,圧力制御弁,流量制御弁,方向制御弁の3種類があります.ここでは,開発中の方向制御弁の一種を紹介します.
|